
Warsaw 25.03.2014
BACnet_BOSCH VER. 1.0
MANUAL
Wiązana 28b
04-680 Warszawa
tel.: (+48 22) 213-92-69
tel./fax: (+48 22) 615-89-84
e-mail: tiger-soft@tiger-soft.com.pl
Table of contents
1) Introduction
2) Pre-configured hardware solution
3) Installing the I/O driver
4) Software registration
5) Configuring the BACnet_BOSCH
6) Configuring a BMS
7) Starting and stopping the BACnet_BOSCH
The BACnet_BOSCH ver. 1.0 is a communication driver which allows to connect BMS system with a fire protection system from BOSCH. The driver may be connected to a BOSCH central unit with the help of the FPA-5000 OPC-Server. One site of the driver (OPC client) is connected to the Bosch OPC server. FPA-5000 server required:
2) Pre-configured hardware solution
A BACnet_BOSCH ver. 1.0 can be delivered with dedicated hardware. It is usually small PC computer with Microsoft Windows Embedded operating system.
This computer has already BACnet_BOSCH installed and registered. So, there is no need to do procedures from point 3 and 4 of this manual.
However there is usually a need to change a Configuration.cbb file as it was described in point 5. Usually an BOSCH panel is connected to COM1.
A BACnet_BOSCH service is configured to start automatically after an operating system starts. You can connect to a computer by using a Remote Desktop.
A computer has one of following default parameters:
|
Computer name |
User |
Password |
Workgroup |
IP address |
| TSBBOSCH1 | Administrator | $tsbBOSCH01 | TS | 10.10.1.101 |
| TSBBOSCH1 | Administrator | $tsbBOSCH01 | TS | 192.168.1.101 |
Run BACnet_BOSCH_INSTALL.EXE.Installation software will put BACnet_BOSCH files into the C:\Program Files\TIGER_SOFT\BACnet_BOSCH_1_0 directory or another directory chosen by the user. Shortcuts to the manual and registration software exist in the group BACnet_BOSCH ver. 1.0 (access from the Start menu). The driver is installed as a service.
BACnet_BOSCH should be registered after installation using TIGER-SOFT internet service.
SOFTWARE REGISTRATION from BACnet_BOSCH group should be started first. This program generates file gen_lic.lic and
saves it in the main driver directory. Then you have to connect to
http://www.tiger-soft.com.pl/Registration/registration.html,
fill the form and receive the registration code. This code should be put to the editable field in the SOFTWARE REGISTRATION.
Press OK to finish registration process.
5) Configuring the BACnet_BOSCH
The file - Configuration.cbb is used for the driver configuration. It exists in the same directory like the BACnet_BOSCH.exe.
An example of the file is presented below.
# BACnet-BOSCH - configuration file
# CHANNEL - channel number 1
# ACTIVE - channel activation. Possible values YES,NO
# BOSCH_ProgID ProgID of the BOSCH OPC server
# TIMEOUT [s]. Possible values from the range 1-9999 [s]
# *****BACnet*****
# D_ID device number in BACnet.
# EVC number of the Event object of type Class.
# D_N device name in BACnet.
# EVC_N name of the Event object of type Class.
# L_IP local IP address.
# L_PORT port used by BACnet_BOSCH to communicate with BMS.
# D_PORT - the port used by computers on the network, dedicated to BACnet. This is usually port 47808.
# BACnet_TIMEOUT - Time after which in the absence of BACnet communication error is reported.
# Possible values in the range 1-9999 [s]
# N_P_ID - a process number to which notifications are sent.
# N_P_A OR N_P_F - priorities notifications for alarms and faults.
# N_P_N priority notifications certifying, after confirmation by the end user or damage.
# N_R_UDP - IP address of the recipient notifications (client UDP).
# ROUTER - ip address of a router (UDP-> Ethernet)
# DNET - Local Network Number The number of local BACnet network
# N_R_ETH - MAC number of the recipient notifications (ETHERNET client).
# The list of types with alarms and faults levels used for notifications, configured in the following format:
# TName$A[al%al...]$F[f%f...]$EVCA[ALARM TEXT]$EVCF[FAULT TEXT]$EVCN[NORMAL TEXT]
# ,where Name-type name (apart from Default it is part of a point name),
# al - value of a point that should be notified by the system like an alarm,
# f - value of a point that should be notified by the system like a fault,
# ALARM TEXT,FAULT TEXT,NORMAL TEXT - texts which are used by a notification message
#******************************1******************************
CHANNEL=1
ACTIVE=YES
BOSCH_ProgId=Bosch.FPA5000OpcServer.1
TIMEOUT=30
D_ID=1221
EVC=91
D_N=BOSCH
EVC_N=AVI-EVC1
#L_IP=192.168.1.150
L_IP=192.168.1.101
L_PORT=47808
D_PORT=47808
BACnet_TIMEOUT=20
N_P_ID=1
N_P_A=100
N_P_F=120
N_P_N=150
#N_R_UDP=192.168.1.150
N_R_UDP=192.168.1.102
#ROUTER=10.10.1.220
DNET=10001
#N_R_ETH=00:05:1B:00:41:67
#N_R_ETH=00:07:E9:B0:7C:70
TDefault$A[14%15%16%17%19%23]$F[9%13%24%28%29]$EVCA[ALARM]$EVCF[FAULT]$EVCN[NORMAL]
TCommunication$A[]$F[1]$EVCA[]$EVCF[BOSCH COMMUNICATION FAULT]$EVCN[BOSCH COMMUNICATION NORMAL]
TLicense$A[]$F[]$EVCA[ALARM]$EVCF[FAULT]$EVCN[NORMAL]
#*************************************************************
Communication with a BMS system uses BACnet/IP. Every software that can use data sent via BACnet/IP should work fine with the BACnet_BOSCH.
The BACnet_BOSCH appears in the network as a device configured in Configuration.cbb (DEVICE_ID). It uses a local ip address(LOCAL_IP) and a port defined in LOCAL_PORT.
All alarms and faults notifications will be sent to defined UDP recipients (DESTINATION_PORT,NOTIFICATION_RECIPIENT_UDP,NOTIFICATION_PROCESS_ID) and
to ETHERNET recipients via BACnet router (ROUTER, DNET, NOTIFICATION_RECIPIENT_ETHERNET) by the EVC object.
Every point should be visible in a BMS like Multi-state Value or Output object.
It is possible to use the driver and a BMS system on one computer with one network card.
Two ip addresses should be assigned to this ethernet card, for example 10.10.1.140 and 10.10.1.141.
One is used by a driver and should be put into Configuratio.cbs (LOCAL_IP). The second one should be used by a BMS system.
The driver and a BMS system should use the same port, for example 47808.
Additionally, one notification class exists (EVC), called BOSCH_EVC1, which deals with notifications.
COMMUNICATION point gives information about communication status between the driver and a BOSCH central unit. All other points have the same names as those made available by the OPC server.
The table below shows the states that can take the points.
|
State name |
State value |
State description |
| S0 | 1 | Missing Zone |
| S1 | 2 | Detector masking |
| S2 | 3 | Fade-out/Skip |
| S3 | 4 | Zone switch off |
| S4 | 5 | Detector test |
| S5 | 6 | Stand-by/Control off |
| S6 | 7 | Breakdonw centr. part |
| S7 | 8 | Control On |
| S8 | 9 | Malfunction ground |
| S9 | 10 | Criterion -4 |
| S10 | 11 | Criterion -3 |
| S11 | 12 | Criterion -2 |
| S12 | 13 | Malfunction generic |
| S13 | 14 | Emergency alarm |
| S14 | 15 | Int-Fire |
| S15 | 16 | Pre-Fire |
| S16 | 17 | Ext-Fire (TU) |
| S17 | 18 | Trigger disarmed |
| S18 | 19 | Intern-Alarm |
| S19 | 20 | Int-Sabotage |
| S20 | 21 | Ext-Sabotage (TU) |
| S21 | 22 | Ext-Intrusion (TU) |
| S22 | 23 | Hold-up Alarm (TU) |
| S23 | 24 | Ext-Malfunction.(TU)/Ext-Fire. (TU) |
| S24 | 25 | Stand-by/Off |
| S25 | 26 | On |
| S26 | 27 | Acknowledgement |
| S27 | 28 | Malfunction |
| S28 | 29 | Malfunction power supply |
| S29 | 30 | Switch Off |
| S30 | 31 | Alarm verification |
| S31 | 32 | Address Blocking |
| S32 | 33 | Triggering generic |
| S33 | 34 | Maint.-Stand-by OMM |
| S34 | 35 | Maint.-Light Pollution |
| S35 | 36 | Maint.-Heavy Pollution |
| S36 | 37 | Maint.-Alarm OMM |
| S37 | 38 | Maint.-Stand-by/Control Off |
| S38 | 39 | Maint.-Breakdown Centr. Part |
| S39 | 40 | Maint.-Control On |
| S40 | 41 | Maint.-Malfunction Ground |
| S41 | 42 | Maint.-Criterion-4 |
| S42 | 43 | Maint.-Criterion -3 |
| S43 | 44 | Maint.-Criterion -2 |
| S44 | 45 | Maint.-Malfunction |
| S45 | 46 | Maint.-Emergency Alarm |
| S46 | 47 | Maint.-Int-Fire |
| S47 | 48 | Maint.-Pre-Fire |
| S48 | 49 | Maint.-Ext-Fire |
| S49 | 50 | Maint.-Triggering |
| S50 | 51 | Maint.-Intern Alarm |
| S51 | 52 | Maint.-Alarm Thermo (UGM) |
| S52 | 53 | Maint.-Alarm Optics (UGM) |
| S53 | 54 | Maint.-Ext-Intrusion (UGM) |
| S54 | 55 | Pollution (UGM) |
| S55 | 56 | Maint.-Malfunction-Ext |
| S56 | 57 | Stand-by R-R/Max (UGM) |
| S57 | 58 | Stand-by ThermoMax (UGM) |
| S58 | 59 | Stand-by Optics (UGM) |
| S59 | 60 | Alarm Pre-Level (UGM) |
| S60 | 61 | Fire-Int Thermo (UGM) |
| S61 | 62 | Fire-Int Optics (UGM) |
| S62 | 63 | Fire-Ext Thermo (UGM) |
| S63 | 64 | Fire-Ext Optics (UGM) |
| S64 | 65 | Stand-by R-R/Max |
| S65 | 66 | Stand-by TMax |
| S66 | 67 | Stand-by Optics |
| S67 | 68 | Stand-by Combi |
| S68 | 69 | Light Pollution |
| S69 | 70 | Heavy Pollution |
| S70 | 71 | Heavy Pollution (Qty.) |
| S71 | 72 | Alarm Pre-Level Ion |
| S72 | 73 | Alarm Pre-Level Optics |
| S73 | 74 | Alarm Pre-Level Thermo |
| S74 | 75 | Alarm Pre-Level Combi |
| S75 | 76 | Maint.-Alarm Optics |
| S76 | 77 | Maint.-Alarm Thermo |
| S77 | 78 | Maint.-Alarm Combi |
| S78 | 79 | Fire-Ext Opt |
| S79 | 80 | Fire-Ext Thermo |
| S80 | 81 | Fire-Ext Combi |
| S81 | 82 | Call Fire Brigade |
| S82 | 83 | Fire-Pre (TU) |
| S83 | 84 | Fire-Int Opt |
| S84 | 85 | Fire-Int Therm |
| S85 | 86 | Maint.-Alarm Optics |
| S86 | 87 | Hold-up alarm with menace (TU) |
| S88 | 89 | Stand-by Day/Internal |
| S89 | 90 | Periph. Control On |
| S90 | 91 | Light Malfunction |
| S91 | 92 | Line Malfunction |
| S92 | 93 | End of Paper |
| S93 | 94 | Triggering Disarmed |
| S94 | 95 | Mains |
| S95 | 96 | Battery |
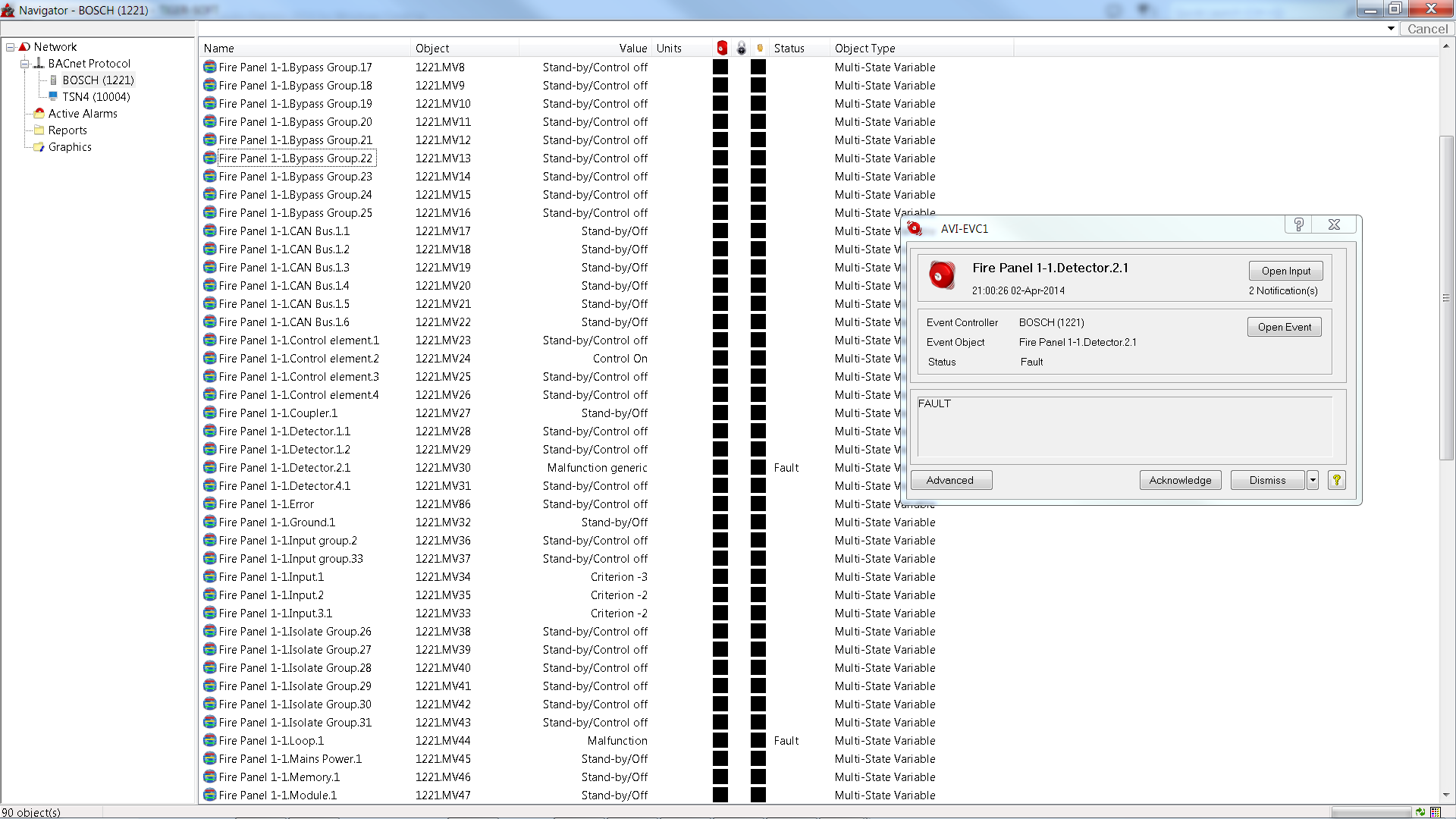
The image below presents a sample screen from Delta Orca BMS system (Img. 1).
7) Starting and stopping the BACnet_BOSCH
The driver can be run from the service manager on Windows NT/2000/2008/XP/Vista/7. Second way is to use command line with commands: BACnet_BOSCH -s for starting and BACnet_BOSCH -z, for stopping it. The service BACnet_BOSCH can be also configured to start automatically after operating system is started.